
Utilized C#, .NET Framework, WPF, and MySQL to develop database tools for system engineers to better diagnose and analyze anomalies in system behavior, reducing debugging time by 90%. Deployed 4 new interactive database features to aid equipment diagnostics and analysis, allowing system engineers to better identify correlations during development. Optimized SQL queries for database application, achieving near 100-fold improvement in query speed, ensuring engineers can seamlessly interact with the database.
Developing for berkeleytime.com using React, TypeScript, GraphQL, Scss, and Git to better course planning tools.
Researching precision placement of DNA origami onto silicon wafers to design novel diagnostic biosensors. Explored various deposition and washing methods, resulting in a 95% improvement in background binding contrast. Evaluated origami-wafer binding quality by performing atomic force microscopy (AFM) analysis.
Analyzed super ferromagnetic iron oxide particle behavior through amplifier circuit testing and particle synthesis. “Broadband Untuned Active Cancellation and Phase Correction of Direct Feedthrough Interference Enables 100-fold Improved Magnetic Particle Imaging Detection” https://www.techrxiv.org/doi/full/10.36227/techrxiv.24309607.v2
Utilizing Facebook's ESMFold algorithms for zero-shot prediction of mutation sequence fitness to inform the engineering of plant protein cytochrome P450.
Developing test scaffolds using PDMS (polydimethylsiloxane) microfluidic chips for NPK soil sensors and visualizing test data in meaningful ways.
CITRIS Workforce Innovation Program - Researcher in Ti-Lab at UC Berkeley. Performed atomic force microscopy (AFM) on DNA origami deposited chips. Synthesized wafer samples using lithography and basic cleanroom techniques in the Marvell Nanolab.
react / next.js / javascript / css
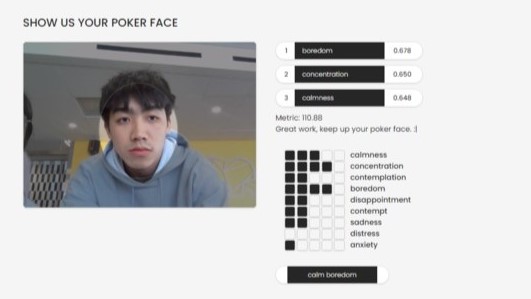
Submission for UC Berkeley AI Hackathon 2024.
An educational tool which uses Hume AI's Expression Measurement API to measure key emotions and return a metric that tells how a player might be performing emotionally.
Additionally, the bot also offers a tool to query GPT4 about the condition of the field, suggestions on how to play, and more.
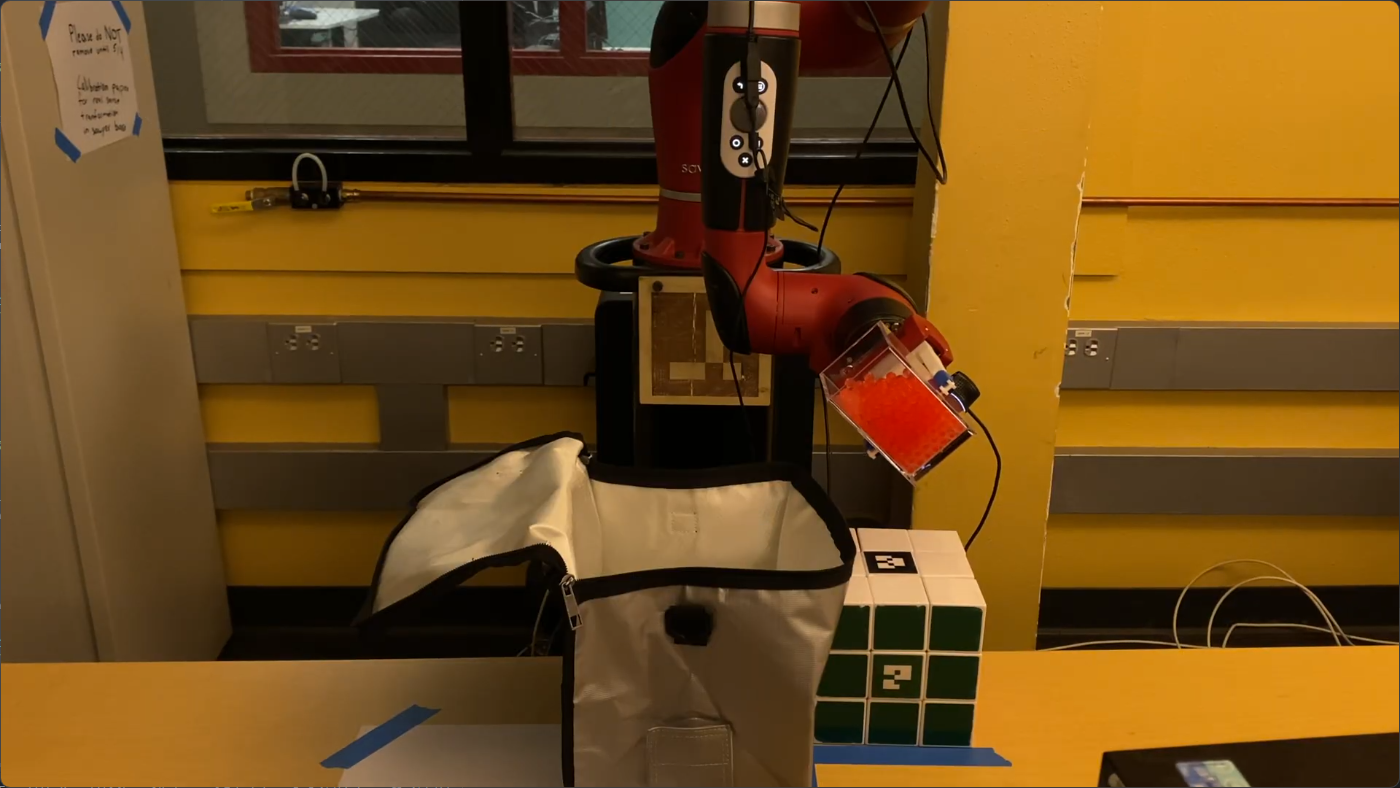
python / ROS / OpenCV
Developed a physics model and planning scheme for estimating fluid in containers and pouring desired amounts using Rethink Robotics' Sawyer Arm and OpenCV.
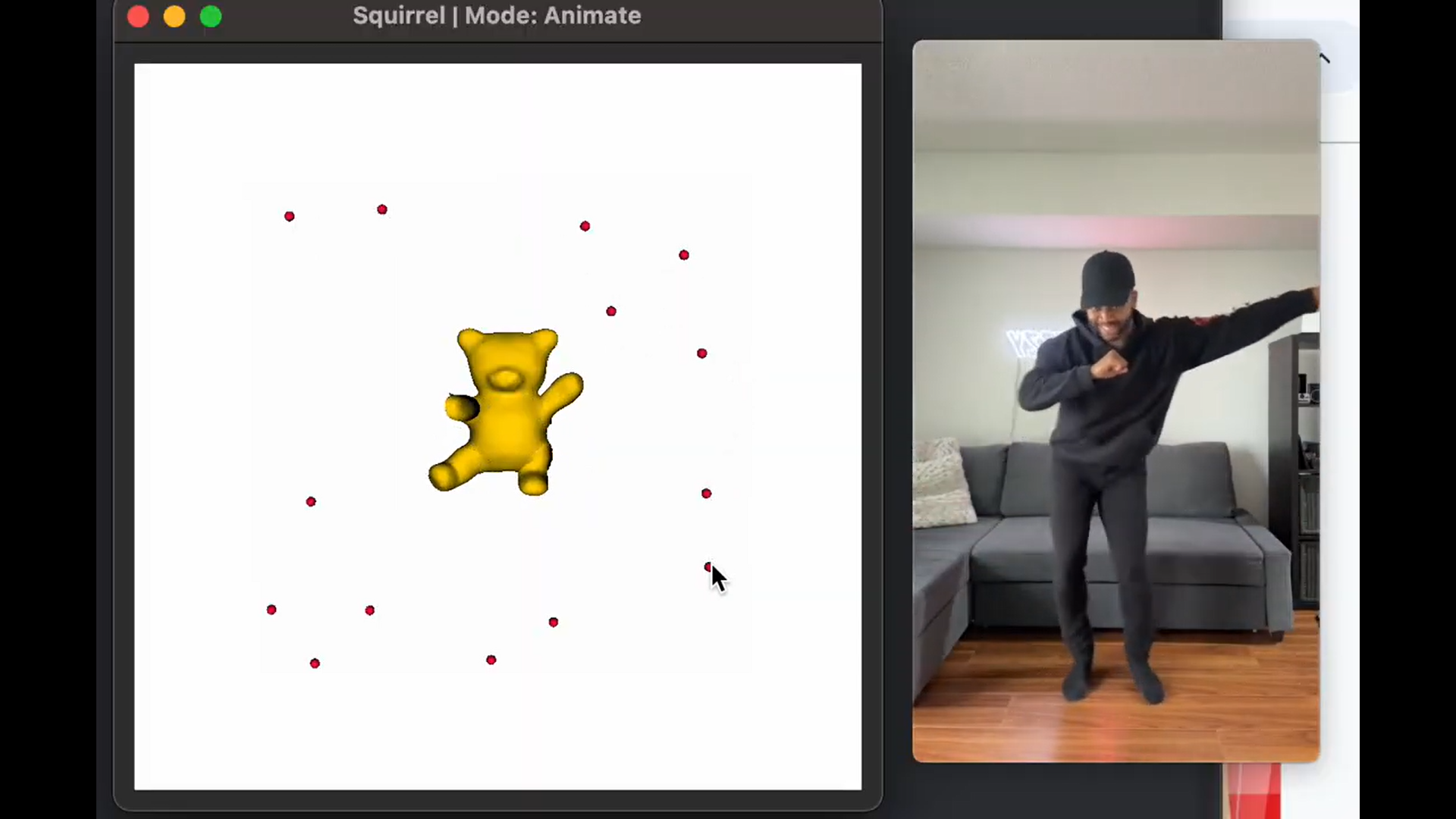
c++ / python / OpenGL
Implemented a rasterizer with antialiasing and texture mapping, mesh editor that builds Bezier surfaces and manipulates triangle meshes, physically-based renderer using path tracing to generate realistic images, and real-time simulation of cloth. Additionally, created animation framework based on spatial keyframing research.
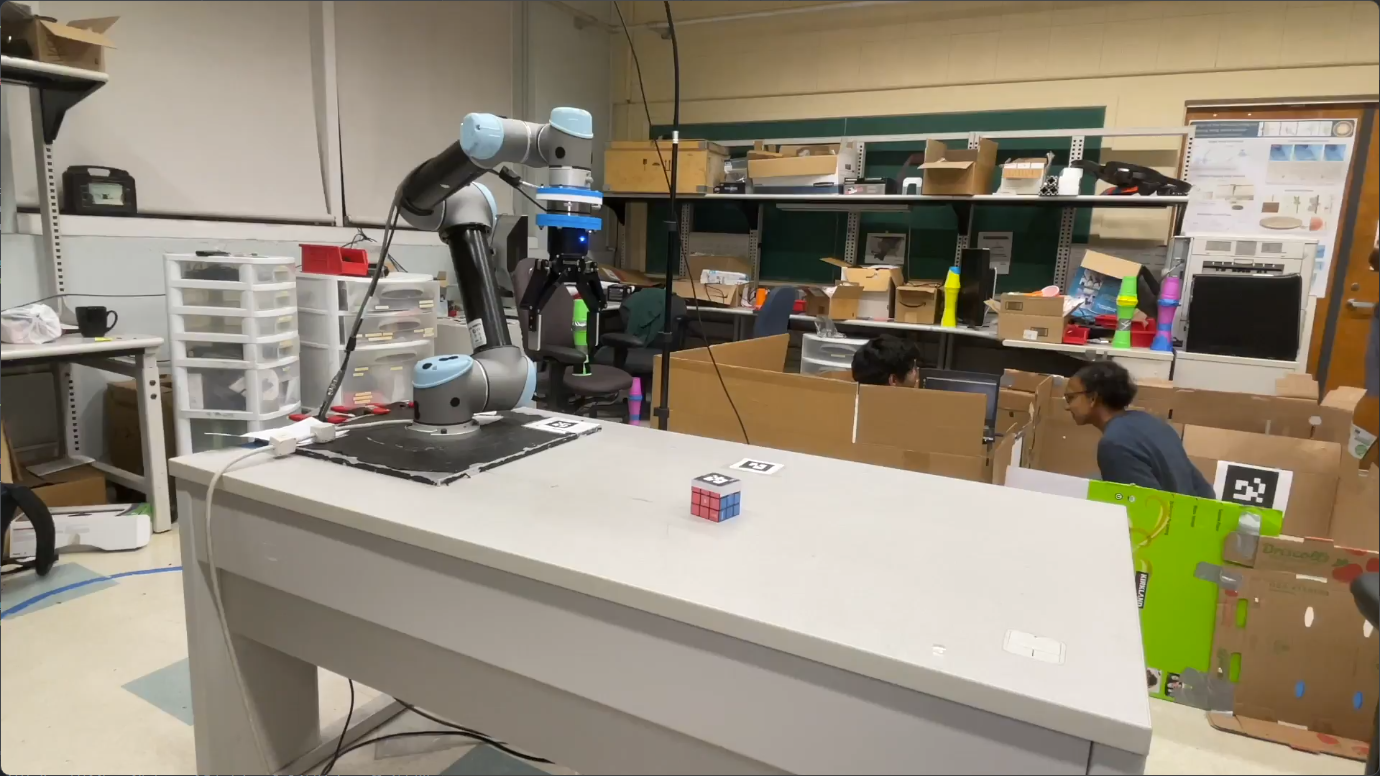
python / ROS / UR5
Developed a planning scheme for estimating different objects' rigidity and moving them between two points using Universal Robots UR5 Arm, Robotiq 2F-140 Gripper, and ATI Axia80 Force/Torque Sensor.
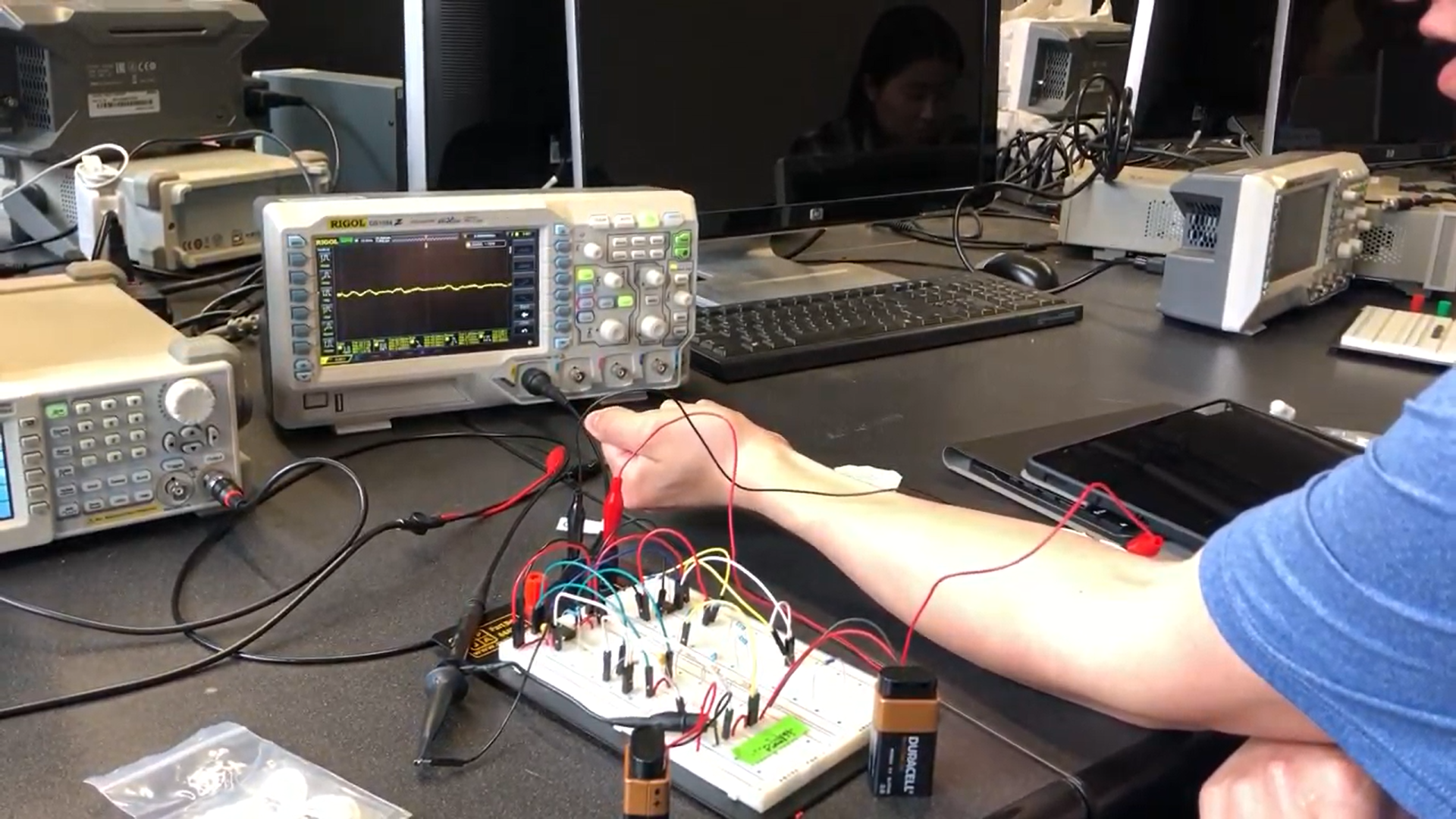
arduino / c++ / signal processing
Designed and built a surface electromyography (EMG) data-acquisition sensor to detect fist formation and finger-specific movement.

python / html / css / SQLite3
A web-portal for the Taiwanese American Student Association that queries and sorts through Venmo transactional data using Venmo API. Allows for keyword and date range searches that would filter the data. Saved the Treasurer 20+ hours of manual labor.